Leonard Bruns
I am a computer vision researcher working at
Niantic Spatial and a PhD candidate at KTH.
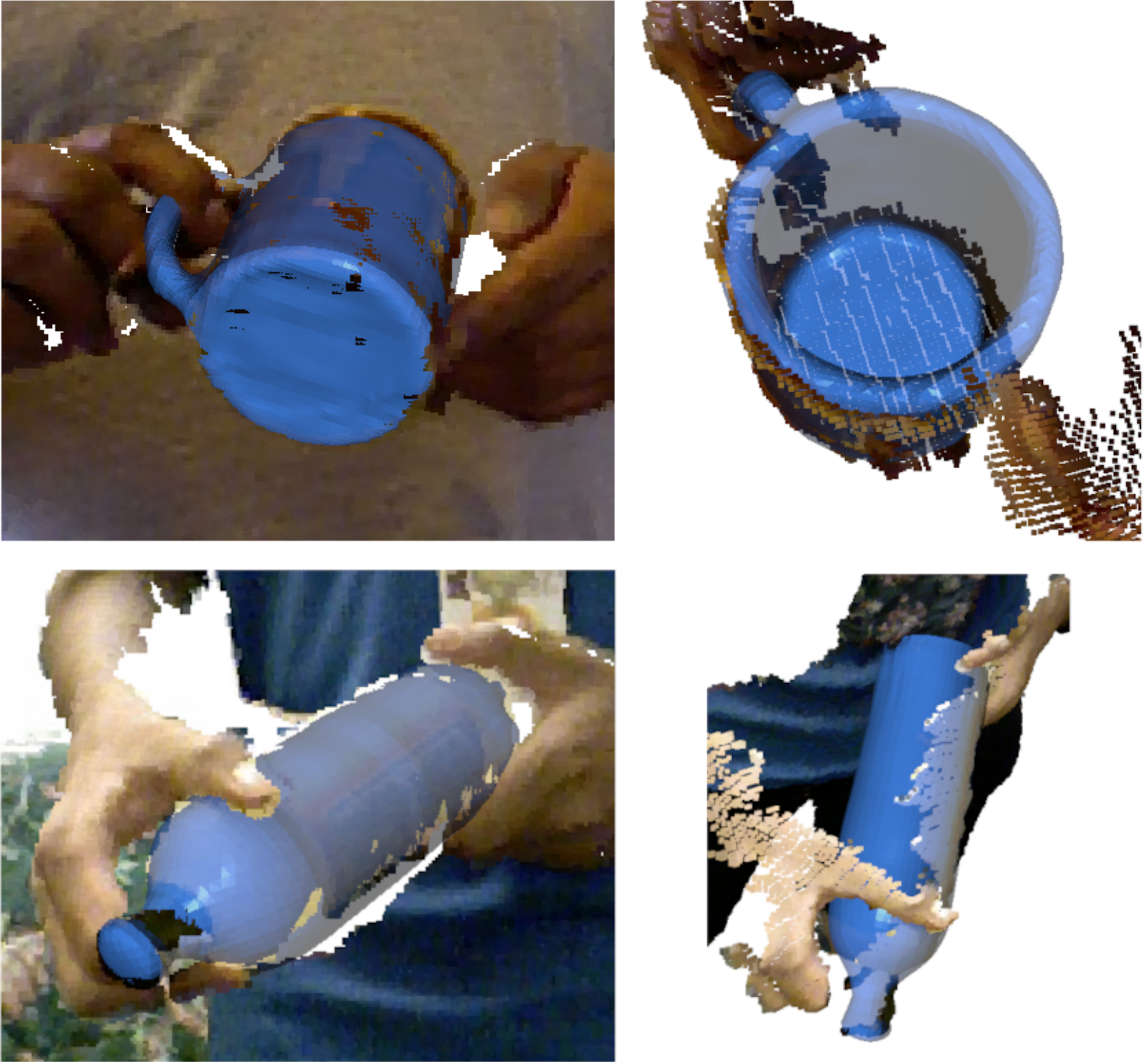
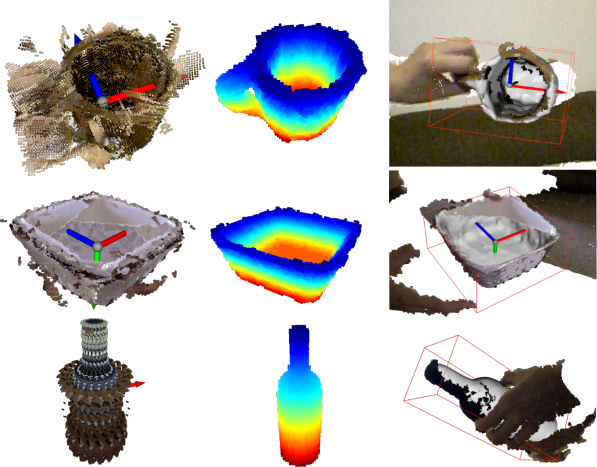
My main research interests are at the intersection of 3D computer vision and robotics (and to a lesser degree computer graphics). I am particularly interested in the development of algorithms for robot perception such as pose and shape estimation of objects from partial information, dense SLAM, and visual relocalization.
My main research interests are at the intersection of 3D computer vision and robotics (and to a lesser degree computer graphics). I am particularly interested in the development of algorithms for robot perception such as pose and shape estimation of objects from partial information, dense SLAM, and visual relocalization.
Last updated: November 2, 2025
Projects
ACE-G: Improving Generalization of Scene Coordinate Regression Through Query Pre-Training
IEEE/CVF International Conference on Computer Vision (ICCV), 26751-26761
Neural Graph Map: Dense Mapping with Efficient Loop Closure Integration
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2900-2909, 2025